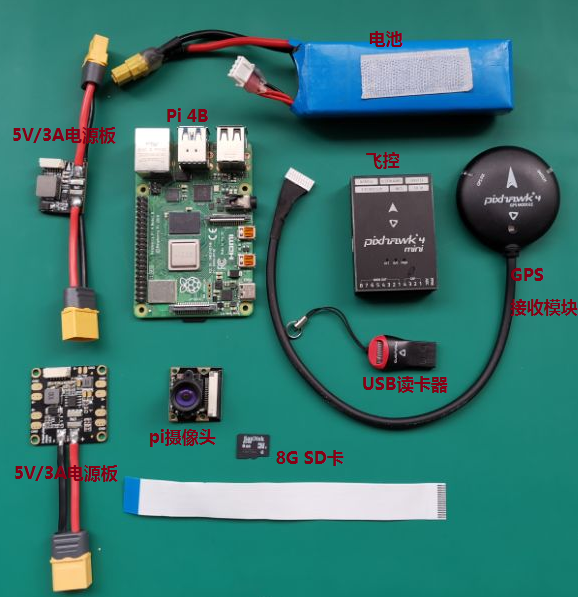
pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
 |
步骤:
打开Mission Planner软件
点击鼠标右键,点击自动航点,点击Create Circle Survey
设置圆形测量的属性
Startalt:起点
endalt:终点
seperation:距离
radius:半径
photos:拍照
start heading:起点航向

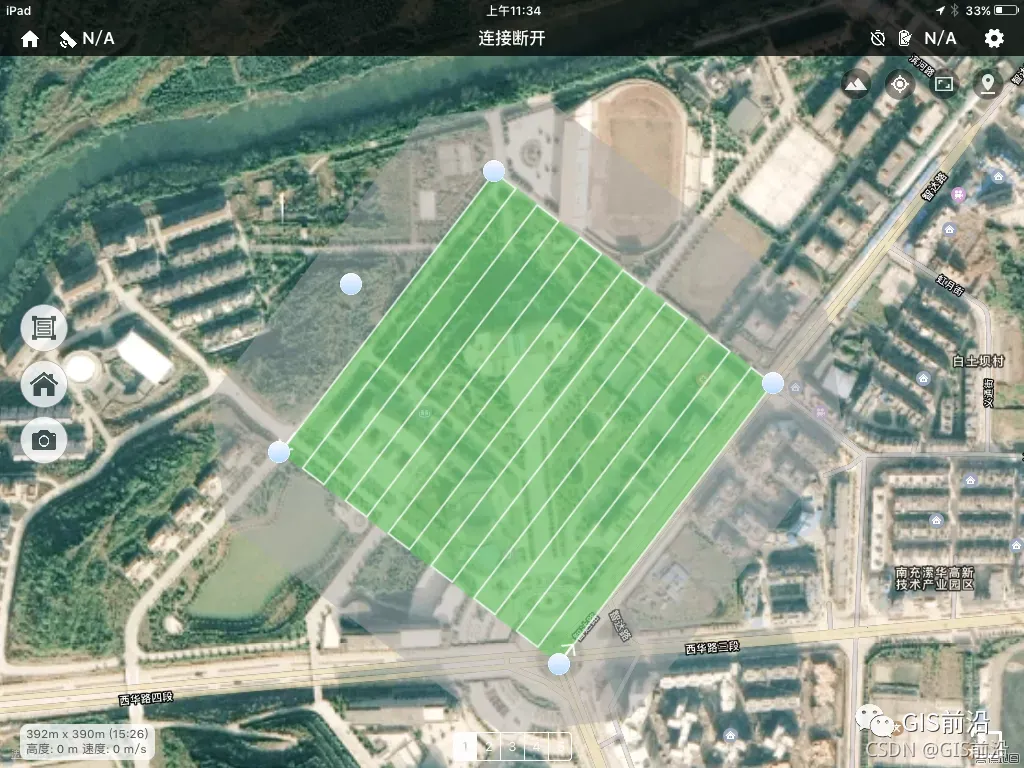
进入MP软件
滑鼠右键,点击绘制多边形,点击Draw a Polygon
随意框一个多边形
滑鼠右键,点击自动航点,点击SimpleGrid
设置简单网格的属性
Altitude:高度
Angle[deg]:角度
Line spacing[m]:每行的距离
Spacing inline[m]:每列的距离
OverShoot[m]:左边超过几米
OverShoot[m]:右边超过几米
Speed:速度
StartFrom:设定任务起始位置
点击Accept,生成简单的网络


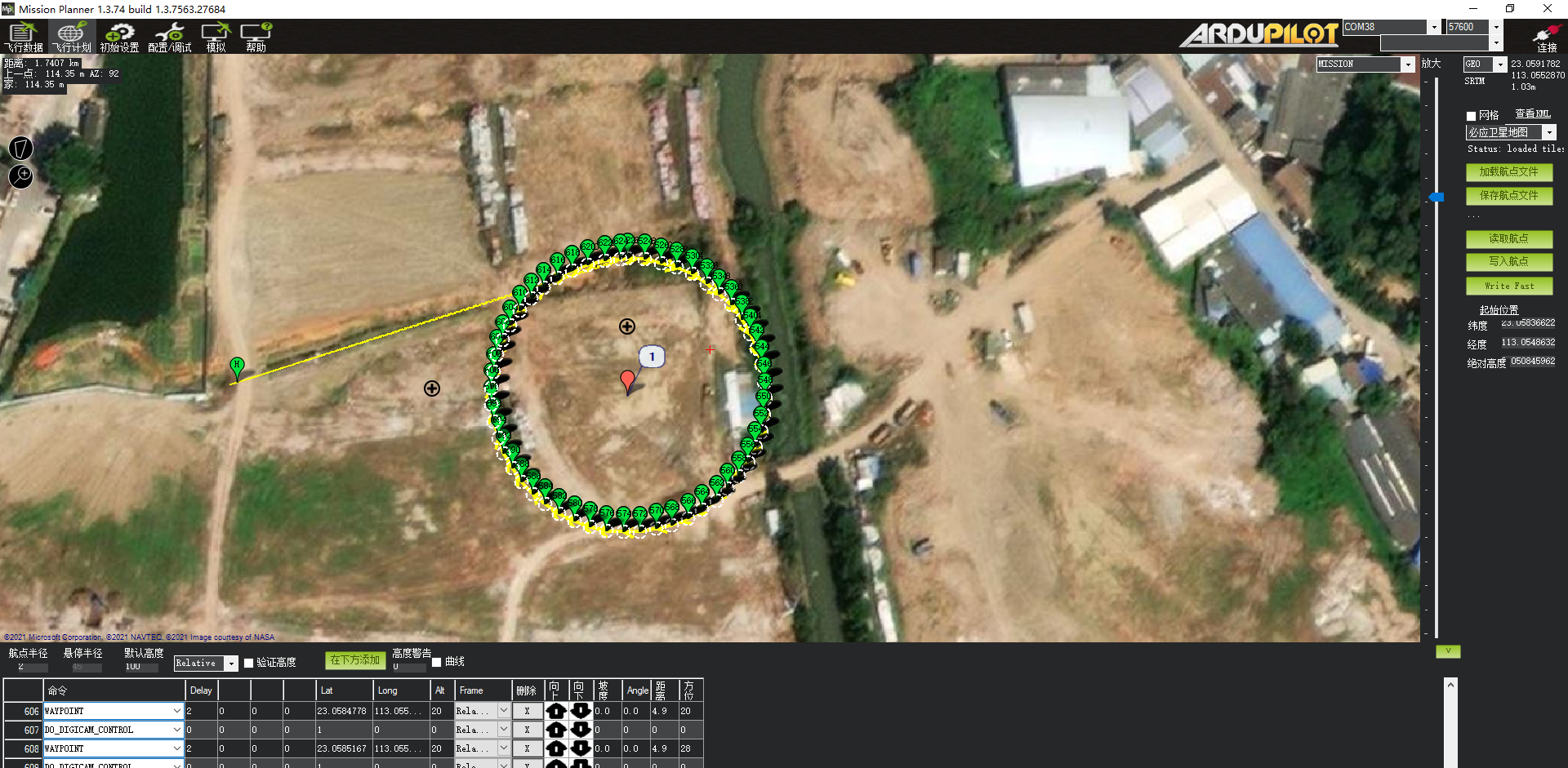
打开Mission Planner软件
点击鼠标右键,点击自动航点,点击创建航点圈
设置航点圈的属性
Radius:设置航点圈的半径
Min Alt:航点的AGL最低高度,从直升机/飞机锁定GPS的点开始算
Max Alt:航点的AGL最高高度,从直升机/飞机锁定GPS的点开始算
alt step:
Angle of first point:第一个点的角度

打开Mission Planner软件
点击鼠标右键,点击自动航点,航点圈
设置航点圈的属性
Radius:设置航点圈的半径
Number of points to generate Circle:生成圈的航点数
Direction of circle:圈的方向,1顺时针,-1逆时针
Angle of first point(whole degress):第一个航点的角度

打开Mission Planner软件
点击鼠标右键,点击自动航点,航点圈
设置航点圈的属性
Radius:设置航点圈的半径
Number of points to generate Circle:生成圈的航点数
Direction of circle:圈的方向,1顺时针,-1逆时针
Angle of first point(whole degress):第一个航点的角度
打开Mission Planner软件
点击飞行计划菜单
点击左侧边界按钮,添加多边形
随意绘制一个多边形框,指定作业区域

点击鼠标右键,点击自动航点,选择自动航点工具Survey(Grid)来创建飞行航线
点击高级选项Advanced Options
自动航点工具Surver(Grid)界面:
菜单Simple
Altitude[m]:飞行高度
Flying Speed[m/s]:飞行速度
Angle[deg]:可调整路径监督
Markers:飞行顺序标记
菜单Grid Options
Distance between lines[m]:换行距离
StartFrom:设定任务起始位置
Home:航点从home点开始
BottomLeft:航点从底部左端开始
TopLeft:航点从顶部左端开始
BottomRight:航点从底部右端开始
TopRight:航点从顶部右端开始
Point:航点从home点开始
调整路径时,滑鼠靠上路径(黄色线条),可看见路径长度
设定完成后,回到Simple菜单,点击Accept确认
打开MissionPlanner软件
点击菜单飞行计划
鼠标右键,选择曲线航点(只对直升机有效,在其他飞行器上插入正常航点)
设置曲线航点的属性
Insert WP after wp#:在多少号航点后面,插入一个曲线航点

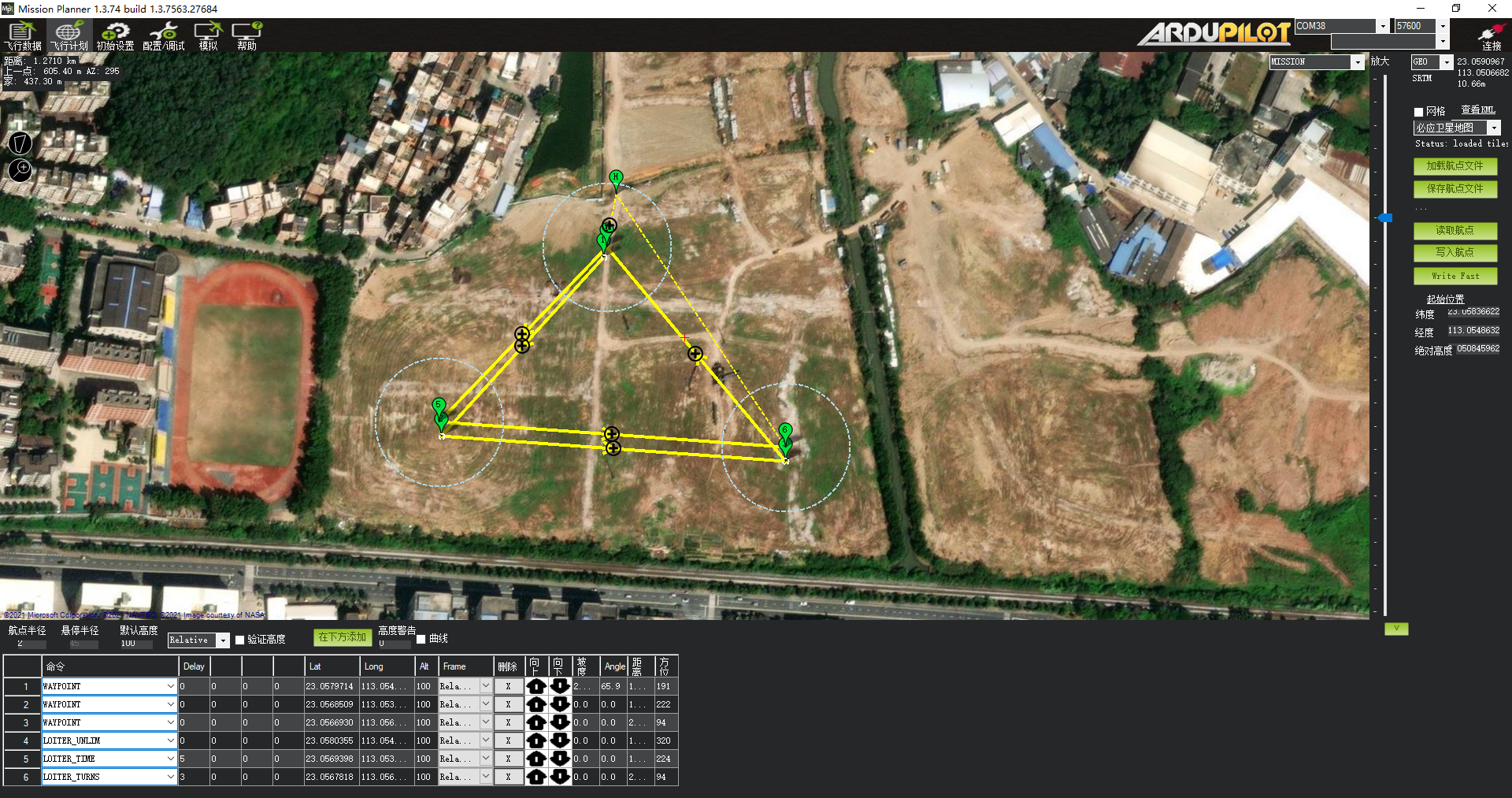
打开Mission Planner软件
菜单栏上选择飞行计划界面
首先选择需要加载的地图,一般情况下选择谷歌中国混合地图或者必应混合地图
在地图上,点击鼠标左键,创建航点

航点的信息
WAYPOINT:是默认的航点命令
Lat:经度
Long:维度
Alt:海拔高度
删除:删除航点
向上:改变航点的顺序
向下:改变航点的顺序
Angle:爬升的角度
距离:与上一个航点的距离