多旋翼机架
DIY整机
飞行控制系统
动力系统
穿越机航拍
无人机整机
固定翼专区
Pixhawk PRO
在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
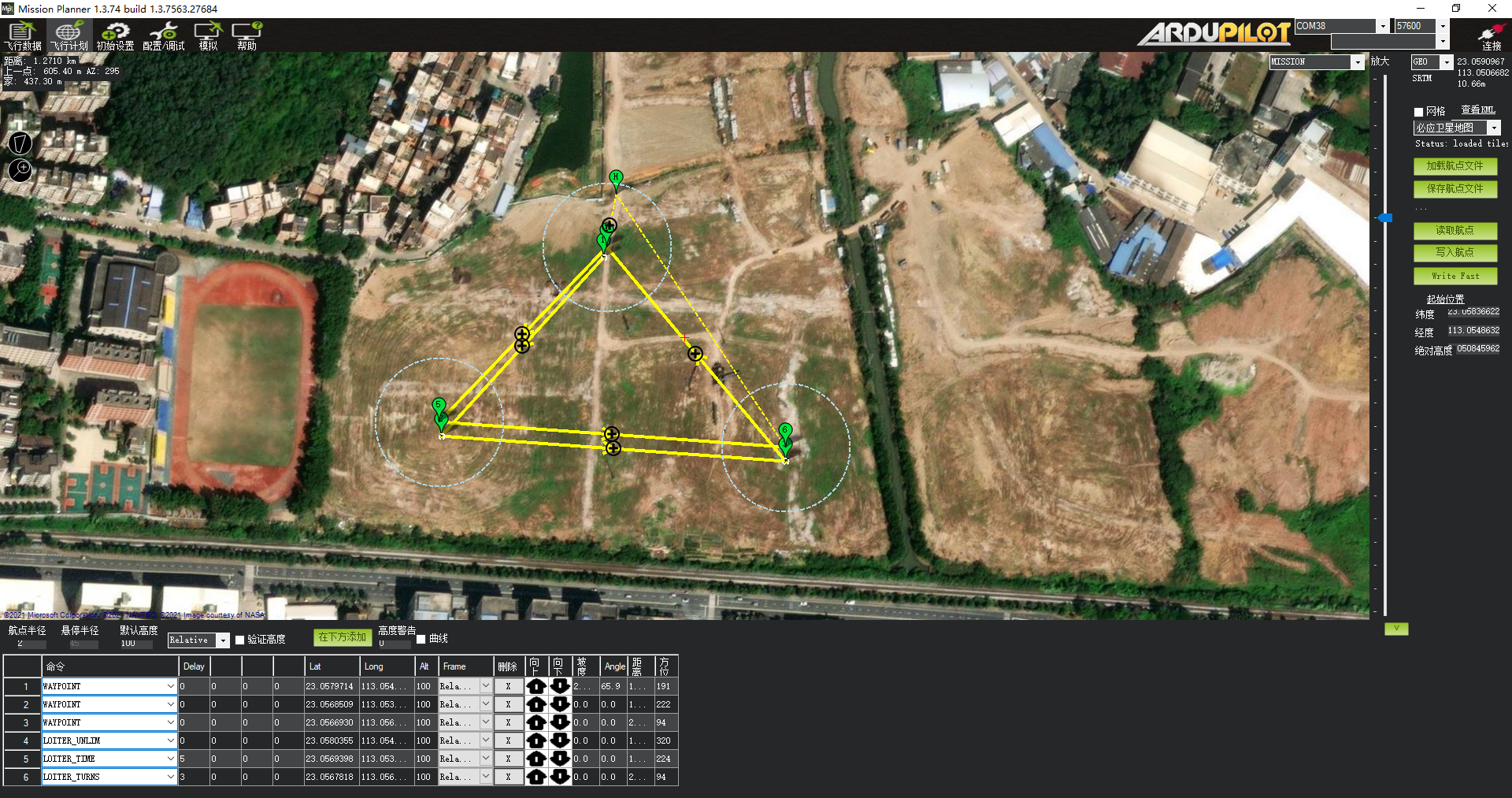
步骤:
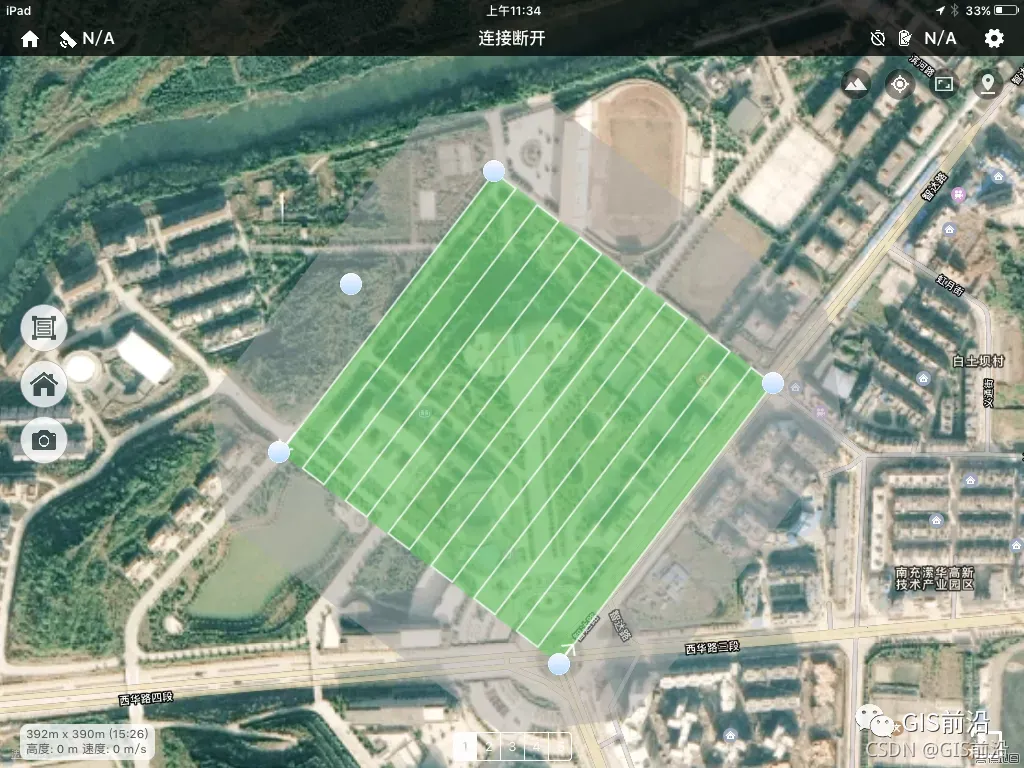
将鼠标滑到航点,点击鼠标右键,选择Loiter留待,选择下面的三种模式
永远模式(LOITER_UNLIM)
永远模式
时间模式(LOITER_TIME)
时间模式
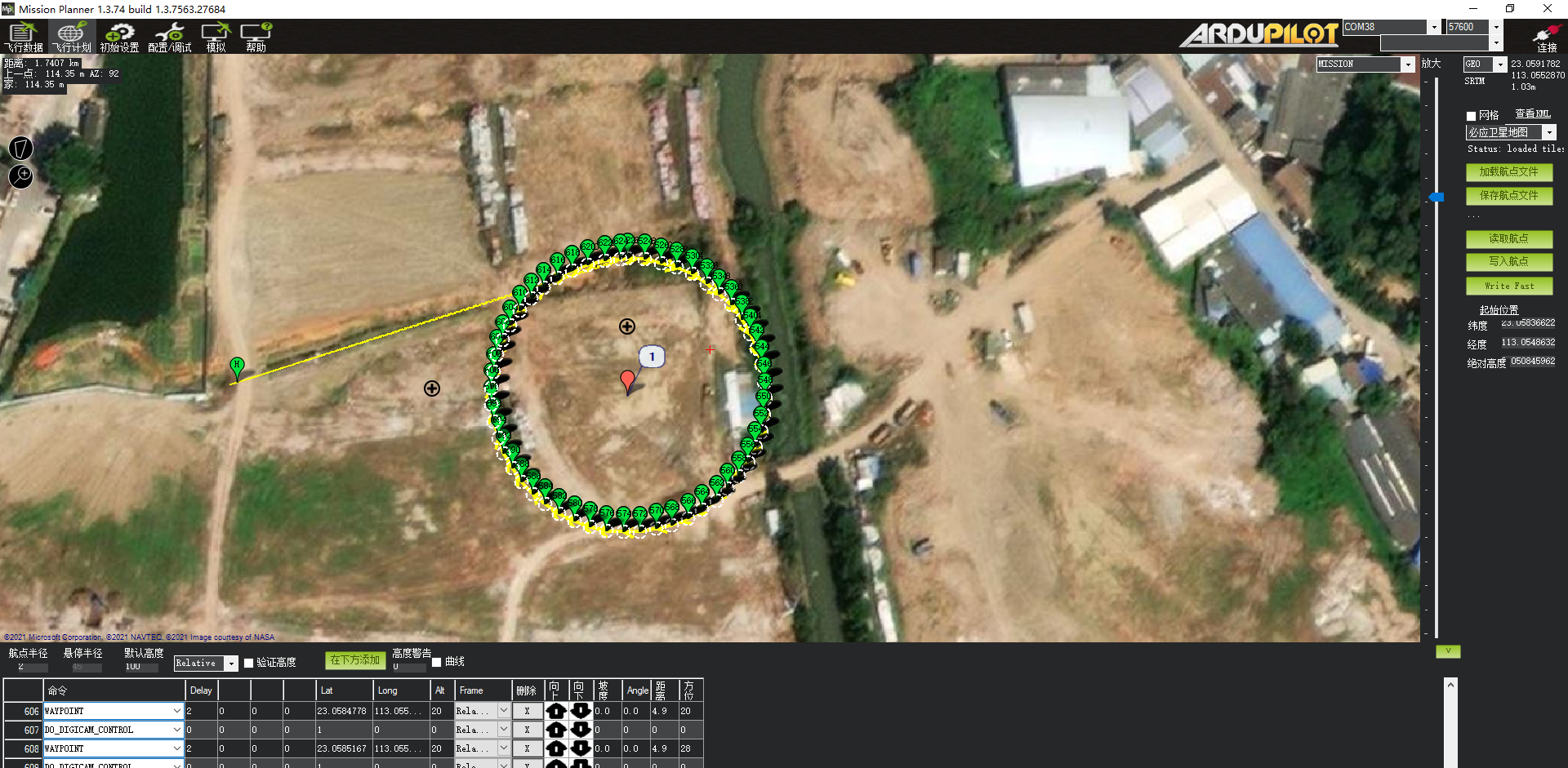
绕圈模式(LOITER_TURNS)
绕圈模式
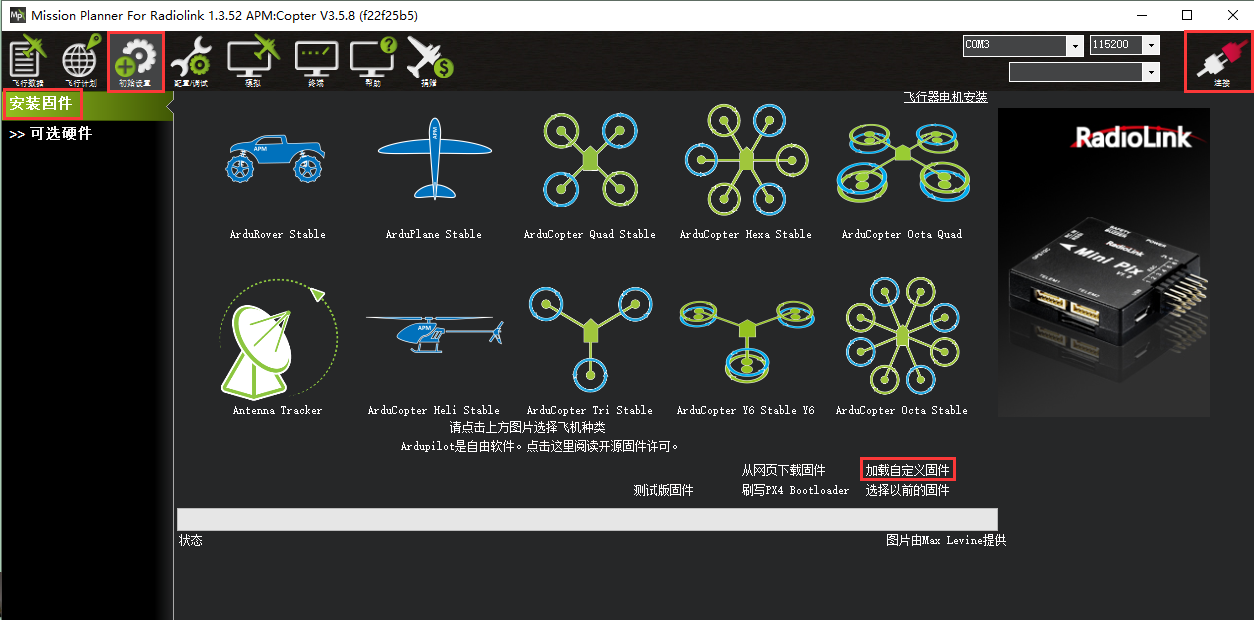
PIXHAWK2.4.8调试教程
航点规划
APM(pixhawk)飞控疑难杂症解决方法汇总(持续更新)
航点规划-集结点
航点规划-航点命令
PixHawk飞控和Mission Planner地面站安装调试3dr数传连接
航点规划-模拟器
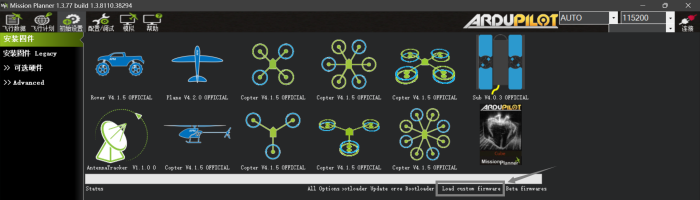
pix飞控调试教程-如何安装参数保密固件
综合信息
安装与调试
产品展示
图片与视频
淘宝店
航模论坛
淘宝直销店
飞控调试讲解
MP地面站详解
Pixhawk难点与二次开发
QGC地面站
固定翼飞控
穿越机组装
跑跑啦航模
地址:paopaola.taobao.com
联系人:paopaola
24小时服务热线:928697906
邮箱:928697906@aa.com
微信号:pixhawkpro
pixhawkpro
400-100-1000
928697906@qq.com
928697906
关注我们