
paopaola2025-3-31Pixhawk4636
自定义MAVLink操作
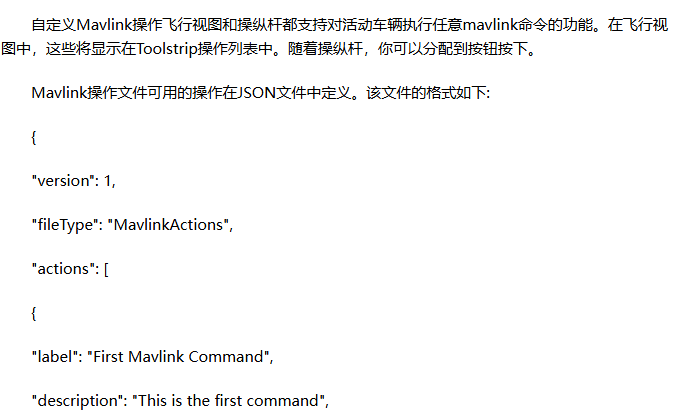
QGC允许用户执行任意的MAVLink命令,在飞行视图中这些命令会显示在工具栏的操作列表中,也可以分配到遥控器的物理按键上。
可执行的MAVLink命令类型
·MAV_CMD_NAV_WAYPOINT:航点指令
·MAV_CMD_NAV_RETURN_TO_LAUNCH:返航指令
·MAV_CMD_NAV_LAND:降落指令
·MAV_CMD_DO_SET_MODE:切换飞行模式
·MAV_CMD_DO_CHANGE_SPEED:改变速度
·MAV_CMD_MISSION_START:开始执行任务
通过操纵杆触发
1.在应用设置→操纵杆设置中配置按键映射
2.选择一个按键,绑定到MAVLink操作
3.飞行中按下对应按键即可触发
飞行视图操作列表
在飞行视图的工具栏中,有一个"操作"下拉菜单,里面列出了所有可用的MAVLink命令。点击即可发送。
注意事项
·发送前请确认飞控处于正确的状态
·某些命令需要先解锁飞控才能执行
·误操作可能导致飞行异常,务必谨慎使用



 微信联系
微信联系 淘宝联系
淘宝联系