
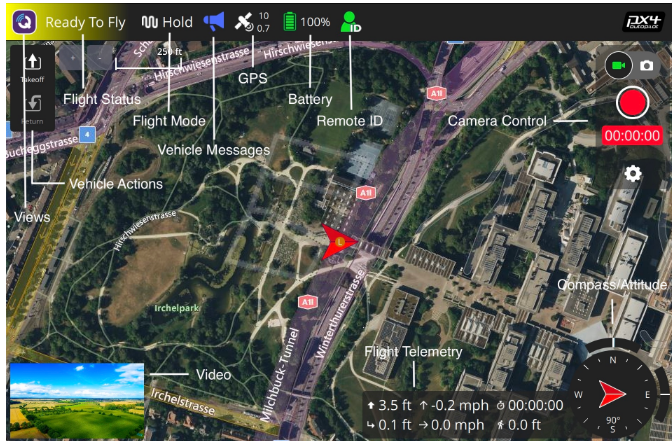
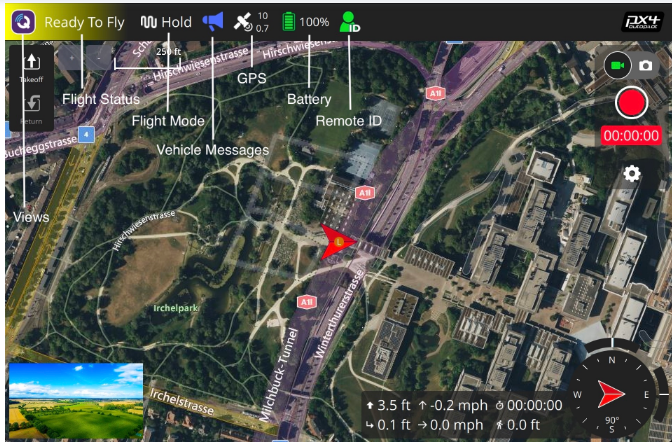
任务规划 — Plan视图使用指南
Plan视图用于规划飞行任务,并将任务上传到飞控。任务规划好发送到飞控后,切换到飞行视图即可执行任务。
基本操作
1.点击左上角"Q"图标 → 选择"计划"进入Plan视图
2.在地图上点击添加航点
3.每个航点可以设置动作(如拍照、悬停、改变高度等)
4.设置完成后点击右上角"上传"按钮,将任务发送到飞控
航点类型
·起飞:设置起飞高度、悬停时间
·航点:基本路径点
·降落:指定降落位置
·悬停:在指定点停留指定时间
·改变速度:调整飞行速度
·改变高度:调整飞行高度
·相机命令:拍照、开始/停止录像等
地理围栏
地理围栏用于限制飞机的飞行区域。在允许区域之外飞行时,飞控会自动执行设定的操作(如悬停、返航)。
·支持多边形和圆形围栏
·设置飞行高度上限
·超出围栏时的操作:返航、悬停、降落
注意:ArduPilot 3.6(Rover)和3.7(Copter)以上版本支持地理围栏。PX4从v1.10开始支持。
集会点
集会点是可选择的着陆或悬停位置。在返航模式(RTL)下,飞控可以选择最近的集会点着陆,而不是飞回原点。这对长航程飞行非常有用。
高级规划工具
1.调查模式(Survey)
在多边形区域内创建规则的栅格飞行路径,适用于航测、植被分析等任务。可以设置:
·栅格角度
·航向重叠率
·旁向重叠率
·相机参数
2.结构扫描(Structure Scan)
围绕建筑物创建网格飞行路径,用于捕获垂直表面(如墙面)的图像。适用于建筑检测、立面测绘等。
3.廊道扫描(Corridor Scan)
沿折线创建飞行走廊,适用于道路、管线、电力线的巡检。
4.固定翼着陆(Fixed Wing Landing)
设置固定翼的自动着陆模式:先飞到指定点悬停(或盘旋),然后沿下滑道着陆。ArduPilot和PX4均支持。
模式预设
可以将常用的任务参数保存为预设,方便下次调用。目前支持调查模式的参数保存。



-
如果你需要购买航模产品,可以通过扫码联系哦!
 微信联系
微信联系 淘宝联系
淘宝联系
-
-
个人微信扫码

工作时间
周一至周日 9:00-21:00
-
如果你需要购买航模产品,可以通过扫码联系哦!
- 微信联系
- 淘宝联系