
paopaola2025-3-31Pixhawk4636
集会点设置
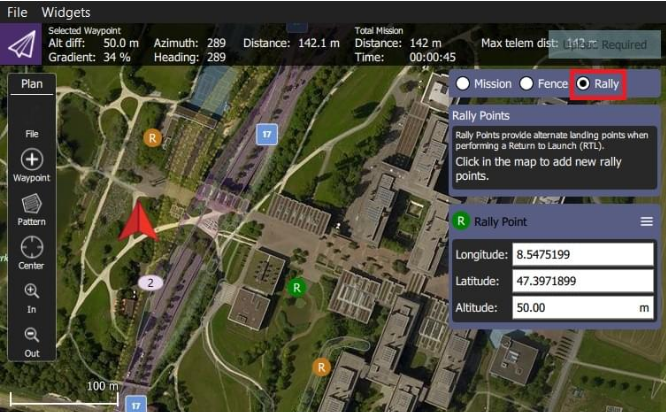
集会点(Rally Point)是预设的备选着陆或盘旋位置。当飞控执行返航(RTL)时,会优先选择最近的集会点而不是原始起飞点。
什么时候需要集会点
·起飞点地形复杂不适合降落
·飞行途中起飞点被遮挡
·需要在不同位置设置多个备降点
如何设置集会点
1.在计划视图中选择"集会点"工具
2.在地图上点击添加集会点
3.设置每个集会点的参数:
·位置坐标(经纬度)
·返回高度
·是否允许降落
4.上传到飞控
RTL时的行为
·飞控会自动计算与各个集会点的距离
·选择最近的集会点作为返航目标
·到达后按预设动作执行(降落或盘旋)
·如果没有设置集会点,则返回原始起飞点
实用建议
·在飞行区域的多个位置设置集会点
·选择开阔、无障碍物的地点
·集会点数量不要过多,3-5个足够



 微信联系
微信联系 淘宝联系
淘宝联系