
paopaola2025-3-31Pixhawk4636
调查模式(测量)详解
调查模式(Survey)是QGC最常用的测绘飞行模式,它在指定区域内自动生成栅格航线,非常适合航测、巡检、植保等需要全覆盖扫描的作业场景。
调查模式的用途
·农业植保:均匀喷洒覆盖
·航测建模:获取高清地理标记图像
·巡检排查:全面覆盖不遗漏
·环境监测:采集区域数据
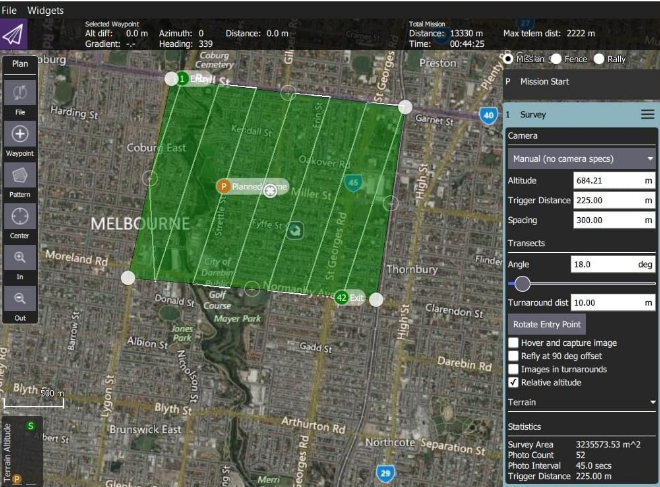
如何设置调查模式
1.在计划视图中选择"调查"图案工具
2.在地图上绘制多边形区域(至少3个顶点)
3.设置以下参数:
·网格角度:航线走向
·间距:两条航线之间的距离
·飞行高度
·边距:距离多边形边界的距离
4.如果有相机,配置相机参数:
·传感器尺寸
·焦距
·目标重叠率(航向/旁向)
5.确认生成航线
高级设置
·预设保存:将常用设置保存为预设,下次直接调用
·多个区域:可以在一次任务中添加多个调查区域
·断点续飞:电量不足时可从中断点继续



 微信联系
微信联系 淘宝联系
淘宝联系