
paopaola2025-3-31Pixhawk4636
结构扫描详解
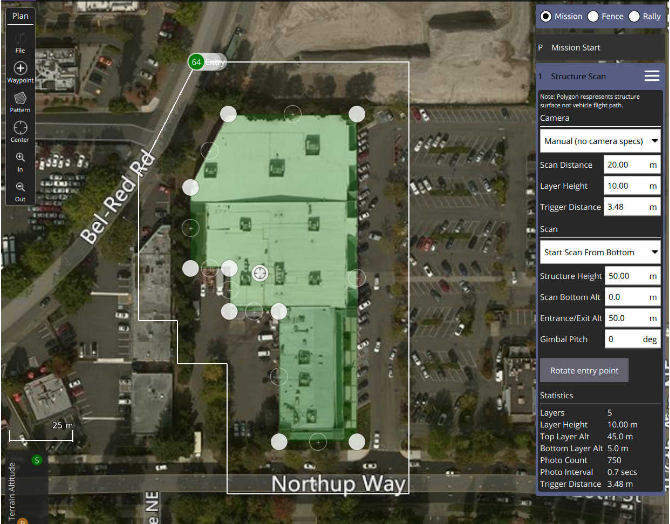
结构扫描(Structure Scan)是QGC专为建筑物、烟囱、塔架等垂直结构设计的扫描模式。它生成环绕目标的网格航线,从各个角度拍摄垂直表面。
结构扫描的用途
·建筑物外观检测:检查外墙裂缝、脱落
·桥梁检测:检查桥墩、桥面底部
·塔架巡检:信号塔、风力发电机
·3D建模:从多角度获取照片,生成三维模型
如何设置结构扫描
1.在计划视图中选择"结构扫描"图案工具
2.在地图上围绕目标绘制多边形(或选择圆形)
3.设置参数:
·飞行高度范围(底部和顶部高度)
·水平间距:环绕航线之间的水平距离
·垂直间距:每层之间的高度差
·相机朝向:朝向目标表面
4.确认生成航线
支持的形状
·任意多边形:适合不规则建筑
·圆形:适合塔架、烟囱等圆柱结构
注意事项
·确保目标周围有足够的飞行空间
·注意障碍物(电线、树枝)
·对于高层建筑,建议分段扫描
结构扫描在建筑行业和基础设施巡检中有非常广泛的应用。



 微信联系
微信联系 淘宝联系
淘宝联系