
QGroundControl地面站入门与安装
QGroundControl(简称QGC)是一款功能强大的开源地面站软件,支持PX4和ArduPilot两大飞控系统。无论是多旋翼、固定翼、地面车还是水下机器人,QGC都能胜任。
第一步:下载与安装
QGC支持Windows、macOS、Linux和Android平台:
·Windows:从QGC官网下载安装包,直接安装即可
·macOS:下载.dmg安装文件
·Linux:下载AppImage文件,执行chmod +x QGroundControl-x86_64.AppImage && ./QGroundControl-x86_64.AppImage
首次运行前还需执行:sudo usermod -a -G dialout $USERsudo apt-get remove modemmanager -y
然后注销重新登录
·Android:从应用商店安装
建议普通用户下载稳定版使用。如果需要体验最新功能,可以下载每日构建版(Daily Build),但每日构建版没有经过充分测试,可能存在不稳定因素。
第二步:启动与连接
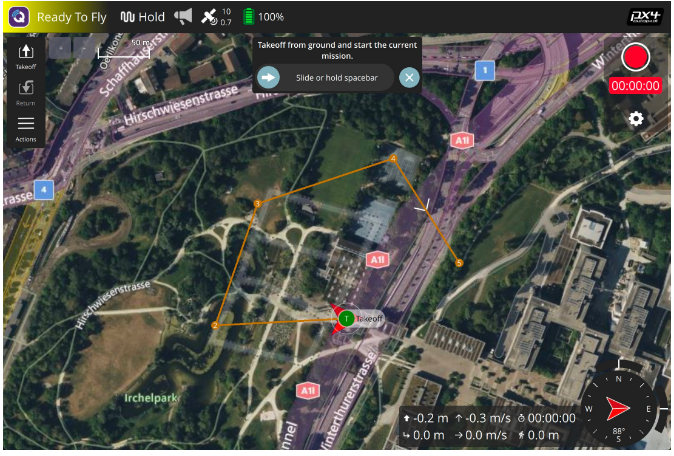
1.启动QGC后的界面是一个平面地图
2.使用USB线或WiFi将飞控连接到电脑——QGC会自动检测并连接
3.连接成功后,QGC会自动切换到飞行视图(如果飞控已配置好)或设置视图(如果飞控需要配置)
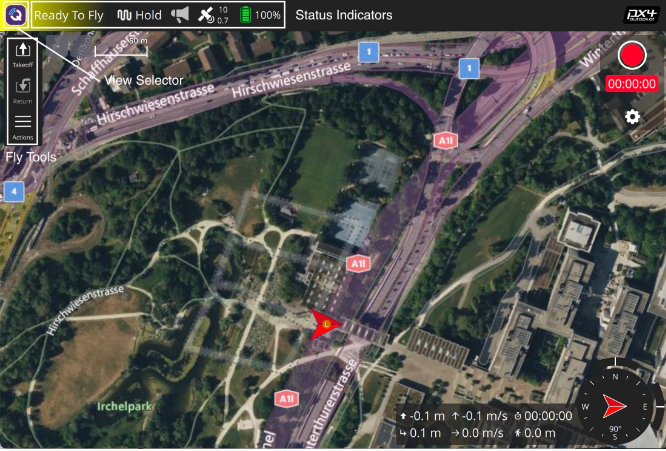
4.在工具栏上可以查看飞控的连接状态
提示:首次使用请确保电脑有网络连接,以便QGC加载地图数据。
第三步:熟悉界面
QGC的界面分为以下几个主要视图:
·飞行视图(Fly):飞行中监视和控制
·计划视图(Plan):规划飞行任务、地理围栏
·分析工具(Analyze):下载日志、地理标记图像
·车辆设置(Vehicle Setup):配置飞控参数
·应用设置(App Settings):配置QGC本身
使用屏幕左上角的菜单按钮切换视图。
常见连接问题排查
问题1:连接后车辆未显示
如果USB或WiFi已经连接但QGC没有显示车辆,可以按以下步骤排查:
1.断开所有硬件连接
2.在QGC中开启LinkManager日志记录(设置视图→MAVLink→启用LinkManager日志)
3.重新连接飞控
4.查看日志输出,QGC会显示它检测到了什么设备
典型日志输出示例:[D] at .../LinkManager.cc:563 - "Waiting for bootloader to finish ..."
问题2:参数下载失败
通常是通信链路质量不佳(信号弱、丢包率高)导致。可以尝试:
·缩短USB线或使用屏蔽线
·更换遥测模块位置减少干扰
·在设置视图的MAVLink页面检查链路质量
问题3:Windows下语音播报语言不正确
QGC是32位应用,而64位Windows默认显示64位语音。解决方法:
运行C:\Windows\SysWOW64\Speech\SpeechUX\sapi.cpl,选择你需要的32位语音包。



-
如果你需要购买航模产品,可以通过扫码联系哦!
 微信联系
微信联系 淘宝联系
淘宝联系
-
-
个人微信扫码

工作时间
周一至周日 9:00-21:00
-
如果你需要购买航模产品,可以通过扫码联系哦!
- 微信联系
- 淘宝联系