
paopaola2025-3-31Pixhawk4636
高级设置与实用工具
一、参数管理
QGC的参数页面提供完整的飞控参数管理功能:
·查找参数:按功能分组(如INS_、GPS_、BATT_),点击左侧分类筛选
·搜索:输入参数名或关键字快速定位
·修改:双击参数值修改,回车确认
·保存:修改后点击"写入"保存到飞控
·刷新:参数未更新时点击刷新
PX4和ArduPilot参数集不同,但管理方式相同。

二、MAVLink设置
用于配置QGC的通信参数:
·协议版本:默认MAVLink 2,兼容MAVLink 1
·链路质量:显示当前丢包率
·日志流(PX4):配置日志上传到Flight Review
·LinkManager日志:连接调试时开启
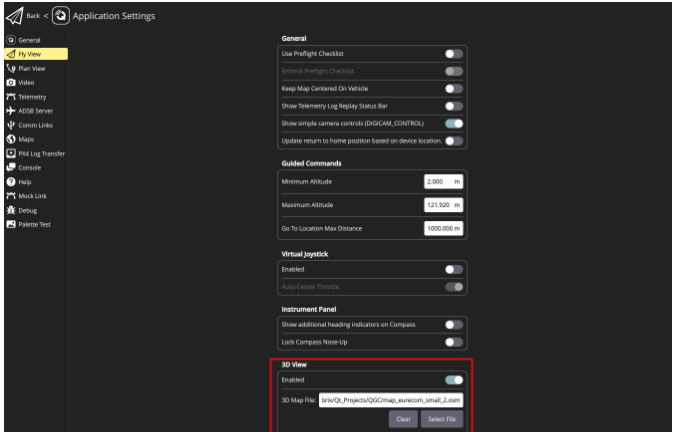
三、应用程序设置
·显示单位:公制/英制
·自动连接设备
·视频设置:视频流开启/配置
·RTK GPS设置
·离线地图:缓存地图用于无网络环境
·CSV日志记录:同时生成CSV格式遥测文件
四、日志下载与分析
1.在分析工具中选择"日志下载"
2.点击"刷新"列出飞控上的日志文件
3.选择下载,完成后可选清除日志释放空间
五、地理标记图像(GeoTag)
航测任务完成后,为拍摄的照片添加GPS位置信息:
1.选择飞行日志文件
2.选择照片目录
3.点击"开始标记"
注:仅支持PX4飞行日志。
六、常用开发调试工具
·MAVLink控制台:连接PX4系统nsh控制台,执行系统命令(仅物理硬件,不支持SITL)
·MAVLink检查器:显示所有MAVLink消息的实时数据和图表
·控制台日志:诊断QGC运行问题,可设定日志级别和模块筛选



-
如果你需要购买航模产品,可以通过扫码联系哦!
 微信联系
微信联系 淘宝联系
淘宝联系
-
-
个人微信扫码

工作时间
周一至周日 9:00-21:00
-
如果你需要购买航模产品,可以通过扫码联系哦!
- 微信联系
- 淘宝联系