
飞控配置与全面校准
本章涵盖飞行前必须完成的各项配置和校准:收音机(遥控器)、传感器(加速度计/罗盘/陀螺仪)、飞行模式映射、电源配置和故障保护设置。
一、收音机(遥控器)校准
1.确保接收机和发射器已对频绑定
2.在QGC中选择车辆设置 → 收音机
3.按照向导提示校准:先将所有摇杆放在中间位置,然后依次拨动每个摇杆到极限位置
4.完成后检查各通道的正反方向
PX4和ArduPilot的校准流程基本相同。
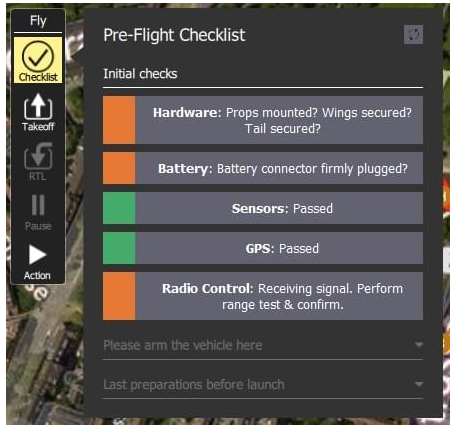
二、传感器校准
已校准的传感器在设置页面显示为绿色,未校准的为红色。
·加速度计:将飞控分别在六个方向(正面朝上、左侧朝上、右侧朝上、机头朝上、机头朝下、背面朝上)各放置一次
·罗盘(磁力计):旋转飞控360度,远离金属物体和电源线
·陀螺仪:将飞控放平即可自动校准
·水平校准:飞控放在水平台面上执行
ArduPilot还支持外部GPS罗盘、空速计(固定翼)和光流传感器的配置。
三、飞行模式映射
1.必须先完成收音机校准
2.进入车辆设置 → 飞行模式
3.为每个开关位置选择对应的飞行模式
4.PX4和ArduPilot的飞行模式选项不同,请根据飞控类型选择
常用飞行模式:自稳(Stabilize)、定高(AltHold)、悬停(Loiter)、返航(RTL)、自动(Auto)
四、电源设置
1.输入电池串联片数(3S、4S、6S等)
2.设置满电电压和空电电压
3.如使用电流计,输入分压器和安培/伏特参数
4.QGC根据这些参数显示剩余电量百分比
五、电机测试
用于验证电机旋转方向:
1.务必拆除螺旋桨!
2.通过滑块控制每个电机转速
3.检查方向是否与飞控预设一致
4.方向不对则交换任意两根电机线
六、故障保护设置
·RC信号丢失:可选悬停、返航、降落
·GPS信号丢失:通常设为悬停或返航
·电池低压:一级报警提醒返航 + 二级强制降落
·高度/距离限制:超出后自动执行操作
安全建议
·初次飞行将所有故障保护设为"悬停"或"返航",不要直接设"降落"
·PX4安全设置界面简洁,ArduPilot则更丰富(ARMING_CHECK、EKF故障、心跳丢失等)
·飞行前务必确认参数已正确保存




-
如果你需要购买航模产品,可以通过扫码联系哦!
 微信联系
微信联系 淘宝联系
淘宝联系
-
-
个人微信扫码

工作时间
周一至周日 9:00-21:00
-
如果你需要购买航模产品,可以通过扫码联系哦!
- 微信联系
- 淘宝联系