
paopaola2025-3-31Pixhawk4636
飞行模式设置与电源配置
飞行模式映射
飞行模式可以通过遥控器上的开关切换。设置方法:
1.必须先完成收音机校准,确保遥控器通道正确工作
2.进入车辆设置→飞行模式
3.为每个开关位置选择对应的飞行模式
4.PX4和ArduPilot的飞行模式选项不同,请根据飞控类型选择
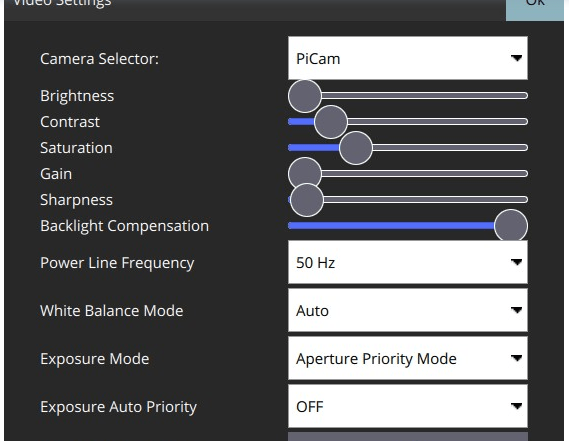
电源设置
电源设置用于配置电池参数:
1.输入电池的串联片数(3S、4S、6S等)
2.设置满电电压和空电电压
3.如果使用电流计,输入分压器和安培/伏特参数
4.QGC会根据这些参数显示剩余电量百分比
电机设置
电机测试页面用于验证电机旋转方向:
1.确保螺旋桨已拆除(安全第一!)
2.通过滑块控制每个电机的转速
3.检查电机旋转方向是否与飞控预设一致
4.如果方向不对,交换任意两根电机线即可反转
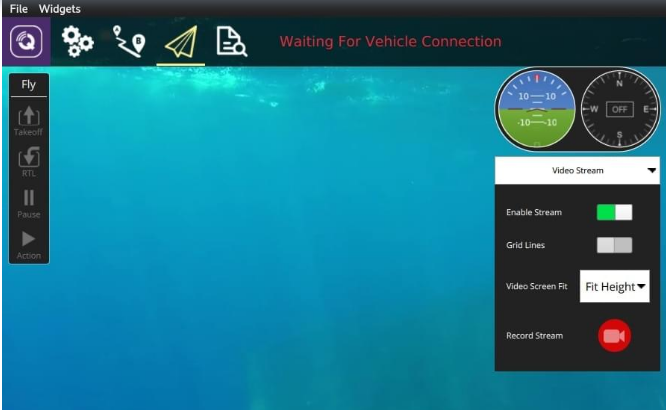
对于水下机器人(ArduSub),推进器的映射可能需要单独配置。



-
如果你需要购买航模产品,可以通过扫码联系哦!
 微信联系
微信联系 淘宝联系
淘宝联系
-
-
个人微信扫码

工作时间
周一至周日 9:00-21:00
-
如果你需要购买航模产品,可以通过扫码联系哦!
- 微信联系
- 淘宝联系