
-

视频叠加
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
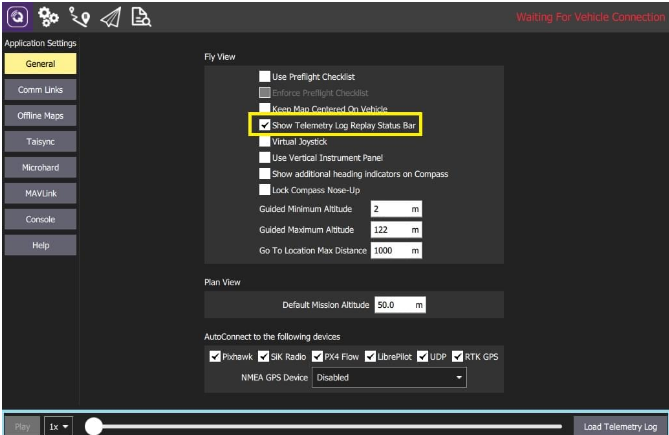
重放飞行数据警告
此功能主要用于自动驾驶仪开发人员/车辆创造者。它仅在桌面版本 (Windows,Linux,Mac OS) 上受支持。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
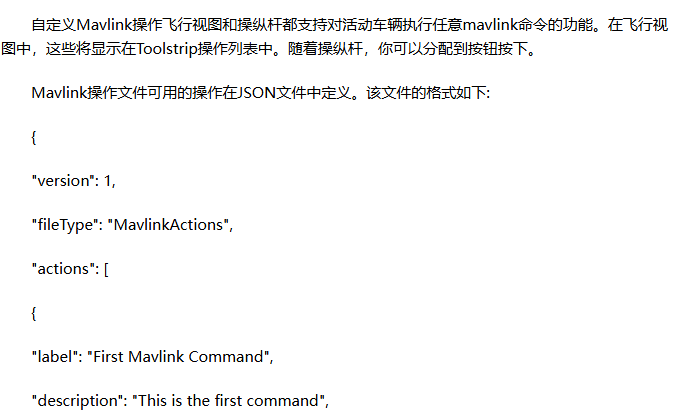
自定义Mavlink操作
飞行视图和操纵杆都支持对活动车辆执行任意mavlink命令的功能。在飞行视图中,这些将显示在Toolstrip操作列表中。随着操纵杆,你可以分配到按钮按下。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
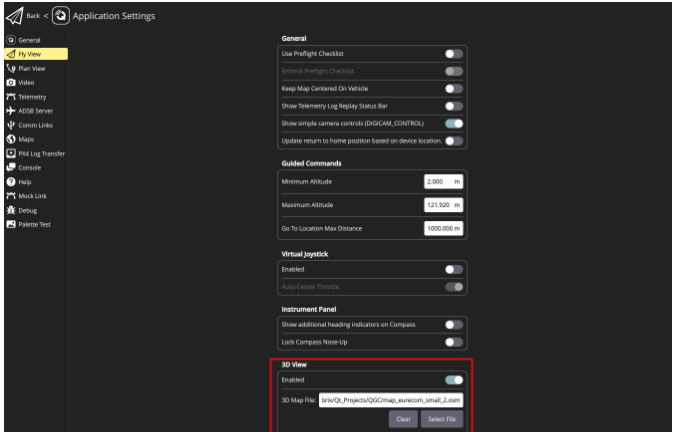
3D视图
D视图用于在3D中可视化和监视车辆、环境和计划的任务。中可用的大多数功能飞行视图也可在3D视图中使用。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -

计划视图
计划视图用于计划自主任务为您的车辆,并将它们上传到车辆。一旦任务是计划并发送到车辆,你切换到飞行视图飞行任务。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
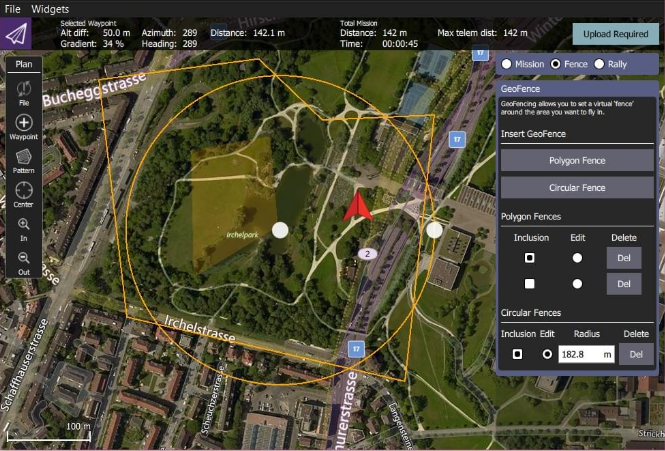
平面图-地理围栏
地理围栏允许您创建车辆可以在其中飞行的虚拟区域,或者不允许飞。您还可以配置在允许区域之外飞行时采取的操作。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
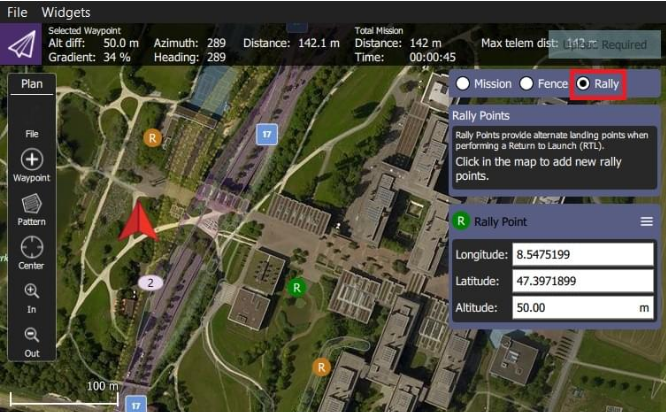
平面图-集会点
集会点是可选择的着陆或游荡地点。它们通常用于在返回/RTL模式中提供比原位更安全或更方便 (例如,更近) 的目的地。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -

图案
图案工具(在平面图 计划工具) 允许您使用简单的图形UI指定复杂的飞行模式。可用的模式工具取决于车辆 (以及对飞行堆栈中车辆类型的支持)。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
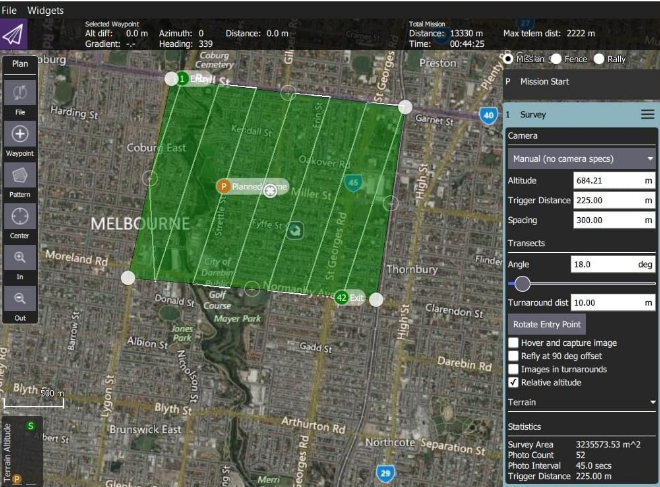
调查 (计划模式)测量
测量允许您在多边形区域上创建栅格飞行图案。您可以指定任意多边形、网格的角度和其他属性,以及适用于创建地理标记图像的相机设置。
飞控综合QG地面站Pixhawk 2.4.8传感器模块 -
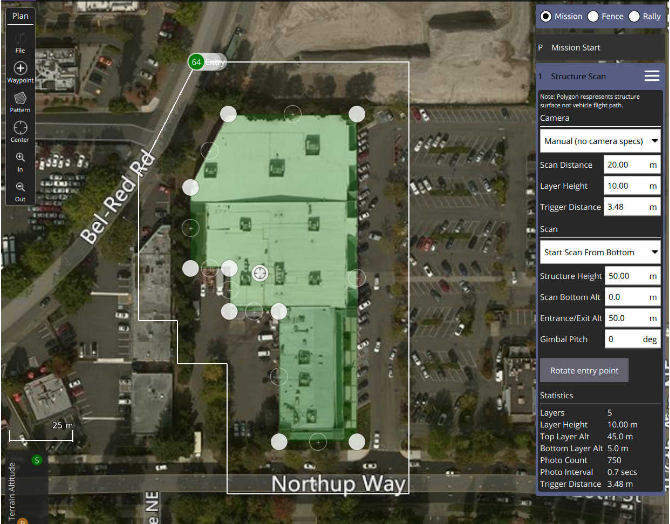
结构扫描
(计划模式)A结构扫描允许您创建一个网格飞行模式,捕获图像垂直表面(例如墙壁) 围绕具有任意多边形 (或圆形) 地面足迹的结构。结构扫描通常用于视觉检查或创建结构的3D模型。
飞控综合QG地面站Pixhawk 2.4.8传感器模块

 微信联系
微信联系 淘宝联系
淘宝联系